Mi vagy ki számít ügyesnek?
Ma alig egyéves korában egy csecsemő már ügyesebb, mint egy robot, és itt egy átlagos mai robotról van szó. Persze, a gépek többet tudnak, mint pusztán csak felvenni és letenni a tárgyakat, de még nem tartunk ott, hogy a világot finoman mozgó ujjakkal felfedező vagy kifinomult kézügyességre utaló természetes tapintást képesek legyünk lemásolni. Vagyis, biztos ez?
Az MIT Számítástechnikai és Mesterséges Intelligencia Laboratóriuma létrehozott egy olyan ügyes robotkezet, amely a tudósok szerint játszi könnyedséggel képes manipulálni különböző tárgyak ezreit. A dologhoz kellett még az OpenAI cég Dactyl (a görög daktylos szóból származó "ujj") névre hallgató mesterséges intelligencia szoftvere, ami szintén segíthet átlépni a fentebb említett határt. A Dactyl vezérelte humanoid robotkéz mindenesetre már kirakott egy Rubik-kockát, ezzel a talán "általános értelemben vett mesterséges intelligenciának" mondható szoftverrel, melynek koncepciója szembe megy az elterjedtebb, egyetlen speciális feladat létrehozására kifejlesztett hasonló programokkal. A projektben alkalmazásra került az "RGB-Stacking" nevű mesterséges látás létrehozására szolgáló rendszer is, amit a DeepMind hozott létre. Ez is elengedhetetlen ahhoz, hogy egy robot képes legyen megtanulni, hogyan kell megragadni és például egymásra helyezni a tárgyakat.
Robotic hand manipulates thousands of objects with ease: https://t.co/zCJoQnhRp0 pic.twitter.com/eb1TIlWrIu
— MIT CSAIL (@MIT_CSAIL) November 5, 2021
Az MIT Számítástechnikai és Mesterséges Intelligencia Laboratóriuma létrehozott egy olyan ügyes robotkezet, amely a tudósok szerint játszi könnyedséggel képes manipulálni különböző tárgyak ezreit. Forrás: Twitter
Ha elkel egy szorgos kéz
A mezőgazdasági robotok különféle módokon növelik a termelés hozamát a gazdálkodók számára. A drónoktól az autonóm traktorokon át a robotkarokig a technológiát kreatív és innovatív alkalmazásokban alkalmazzák. Azt mondanunk sem kel, hogy a mezőgazdaságban milyen hasznos lehetne egy autonóm, precíziós munkavégzésre is alkalmas robotkéz-rendszer. Az MIT Computer Science and Artificial Intelligence Laboratory (CSAIL) tudósainak munkája nagy részben abból áll, hogy a gépeket képessé tegyék az emberi képességek leutánzására. Ehhez egy nagy-léptékű integrált keretrendszert hoztak létre, ami képes több mint kétezer különböző tárgyat mozgatni, áthelyezni robotkezével, bármilyen oldalra és orientációval. A létrehozott robot-képesség, egy pohártól kezdve egy tonhalkonzervig vagy gombostűig bárminek a mozgatását megoldja a robotkézzel, gyorstempójú és tetszőleges módon történő tárgy-felvétellel, és új helyre történő elhelyezéssel.
"Sőt, a robot képes mindezt olyan tárgyakkal is elvégezni, melyekkel még soha nem találkozott, vagyis a képesség eddig egyedülálló módon általánosítható!"
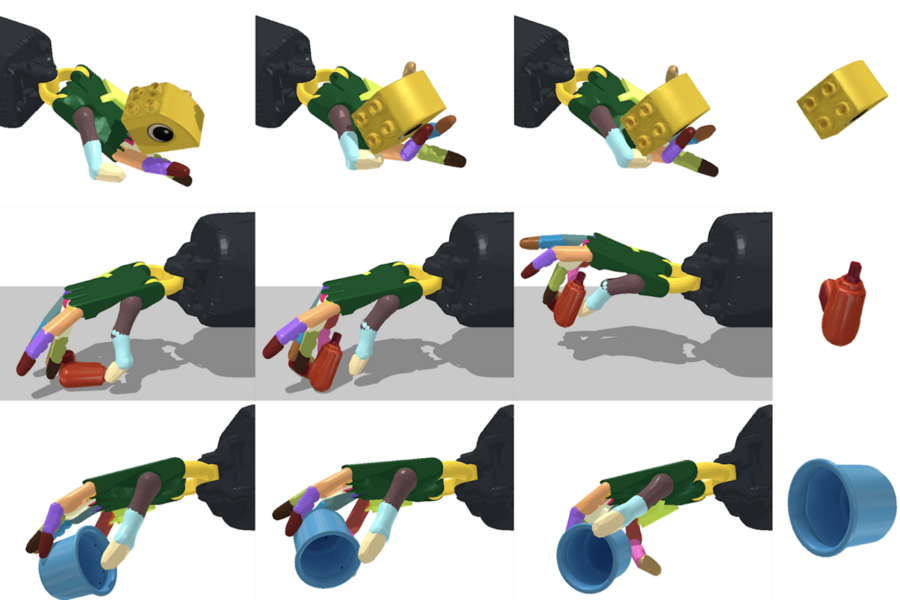
A létrehozott robot-képesség, egy pohártól kezdve egy tonhalkonzervig vagy gombostűig bárminek a mozgatását megoldja a robotkézzel. Fotó: MIT
Szimulált kéz
Az MIT tervezőcsapata egy mérnöki tervezőprogramon belül szimulált, emberi kézre emlékeztető , úgynevezett antropomorf kézzel dolgozott, ami 24 szabadságfokkal rendelkezett, és bizonyítékot szereztek arra is, hogy a rendszer a jövőben átvihető egy valódi robotrendszerre. (A különböző, akár nem robotikához kapcsolódó ipari berendezéseket és alkatrészeket is mind hasonló szoftvereken modellezik, illetve tervezik meg, magyarul semmilyen hátrányt nem jelent, hogy a szóban forgó robotkezet még nem gyártották le a valóságban is. Maga a gyártás - mondjuk egy 3D-nyomtatóval - az egész procedúra legutolsó, legkevésbé bonyolult lépése csupán.)
Tao Chen, az MIT CSAIL PhD-hallgatója, és a projekt vezető kutatója elmondta: "Az iparban leggyakrabban a párhuzamos pofákkal ellátott fogót használják, részben az egyszerű irányíthatósága miatt, de ez ugyanakkor fizikailag képtelen kezelni sok olyan eszközt, melyekkel a mindennapi életben találkozunk. Még egy fogót is nehéz lenne ezzel használni, mert nem lehet ügyesen előre-hátra mozgatni az egyik pofát. A mi rendszerünk viszont lehetővé teszi, hogy egy többujjas kéz ügyesen manipulálja az ilyen szerszámokat, ami új területet nyit a robotikai alkalmazások előtt".
Az MIT Computer Science and Artificial Intelligence Laboratory (CSAIL) tudósainak munkája nagy részben abból áll, hogy a gépeket képessé tegyék az emberi képességek leutánzására. Forrás: YouTube
Ez az újkeletű "kézügyesség" - mely a régebbi rendszerekben rendszerint egyetlen feladatra és függőleges pozícióra korlátozódik - előnyös lehet a logisztika és a gyártás felgyorsításában, segíthet az olyan általános követelmények teljesítésében, mint például a tárgyak elhelyezése a csomagoláshoz szükséges pozíciókba, vagy a szerszámok szélesebb körének ügyes kezelése.
De mit csinál egy agro-bot?
A mezőgazdasági robotok automatizálják a lassú, ismétlődő és unalmas feladatokat a gazdálkodók számára, lehetővé téve számukra, hogy jobban összpontosítsanak az általános termelési hozamok javítására. A mezőgazdaságban leggyakrabban használt robotokat a következőkre használják:
- Betakarítás és szedés
- Gyomirtás
- Önálló kaszálás, metszés, vetés, permetezés és ritkítás
- Fenotipizálás
- Válogatás és csomagolás
- Eszköz (utility) platformok

A mezőgazdasági robotok automatizálják a lassú, ismétlődő és unalmas feladatokat a gazdálkodók számára, lehetővé téve számukra, hogy jobban összpontosítsanak az általános termelési hozamok javítására. Fotó: Unspalsh
A betakarítás és a szedés az egyik legnépszerűbb robotalkalmazás a mezőgazdaságban, mivel a robotok által elért pontosság és sebesség növeli a termés mennyiségét és csökkenti a szántóföldön hagyott terményhulladék mennyiségét.
|
A robotkéz működésének nehézségei
A robotikában a "kézben lévő" tárgyak mozgatása és áthelyezése kihívást jelentő probléma, mivel nagy az ilyenkor vezérlendő motorok száma, és az ujjak és a tárgyak közötti érintkezési állapot gyakran és több paraméter mentén is változik. A több mint kétezer tárgy baleset és sérülésmentes sikeres mozgatásához az MIT rendszerének sokat kellett tanulnia.
A robotkéz problémái akkor jelentkeznek a legnagyobb számban, amikor a kéz lefelé néz, ilyenkor ugyanis a robotnak nemcsak a tárgyat kell manipulálnia, hanem a gravitációval is meg kel küzdenie, hogy a kezelt tárgy ne essen le.

A több mint kétezer tárgy baleset és sérülésmentes sikeres mozgatásához az MIT rendszerének sokat kellett tanulnia. Fotó: Unsplash
Az MIT kutatói rájöttek, hogy egy egyszerű megközelítéssel meg lehet oldani az összetett problémákat. Úgynevezett modellmentes megerősítéses tanulási algoritmust (ilyenkor a mesterséges intelligenciának a környezettel való kölcsönhatásokból kell valós időben létrehoznia az értékfüggvényeket) használtak mélytanulással kombinálva, amit egy úgynevezett "tanár-tanítvány" képzési módszerrel végeztek.
A módszer szerint a "tanár" hálózatot a tárgyra és a robotra vonatkozó olyan információkkal tanítják be, melyek a szimulációban könnyen elérhetők, de a való világban nem, mint például az ujjhegyek elhelyezkedése vagy a tárgy sebessége. Annak érdekében, hogy a robotok a szimuláción kívül, a való életben is működőképesek legyenek, a "tanár" tudását a valós világban megszerezhető megfigyelésekre szűkítik le, például a kamerák által rögzített mélységi (térbeli) információt is tartalmazó képekre, a tárgy pózára és a robot ízületi pozícióira.
"Ezek azok az információk, melyek egy húsvér embernek is a rendelkezésére állnak - ha nem is minden tudatosan és matematikai pontossággal - amikor tárgyakat manipulál, például a kezébe vesz egy szem cseresznyét, feldobja és újra elkapja."

Annak érdekében, hogy a robotok a szimuláción kívül, a való életben is működőképesek legyenek, a "tanár" tudását a valós világban megszerezhető megfigyelésekre szűkítik le, például a tárgy pózára és a robot ízületi pozícióira. Fotó: Unsplash
A robotnál egy "gravitációs tantervet" is alkalmaztak, ahol a robot először nullgravitációs környezetben tanulta meg a készséget, majd a vezérlése lassan alkalmazkodott a normál gravitációs körülményekhez, ami a megfelelő tempóban végezve javította az általános teljesítményt. Megint csak lefordítva ezt a saját testünkre, az ember - szó szerint - túlesik a gravitációs tréningen kisgyermek korában, amikor esve-kelve megismerkedünk a tömegvonzás hatásaival és következményeivel.
Az MIT így betanított robotja a fentieken átesve szintén képes volt áthelyezni, átrendezni nagy számban olyan tárgyakat, melyekkel még soha nem találkozott, és melynek alakját nem ismerte, nem tanították meg neki előre.
De vissza a földekre
Az említett gyakori agro-bot alkalmazásokat nem könnyű automatizálni. Egy paprika szedésére tervezett robotrendszer számos akadályba ütközhet, a látórendszerének meg kell határoznia a paprika helyét és érettségét, persze zord körülmények között is, beleértve jelentős mennyiségű por jelenlétét, a változó fényintenzitást, a hőmérséklet-ingadozásokat és a szél által keltett mozgást.

Az említett gyakori agro-bot alkalmazásokat nem könnyű automatizálni. Fotó: Unsplash
És ez nem is elég, több kell, mint fejlett látórendszer egy paprika leszedéséhez. A robotkarnak ugyanannyi akadállyal rendelkező környezetben kell navigálnia, finoman megragadni a paprikát és sérülésmentesen elhelyezni az erre szolgáló tárolóban. Különösnek hangozhat, de ez a folyamat nagyságrendekkel bonyolultabb egy fém alkatrész összeszerelősorra történő felrakásától és a helyére forrasztásától, amit az autóipari robotok évtizedek óta végeznek sikeresen. A mezőgazdasági robotkarnak dinamikus környezetben kell rugalmasnak lennie, és persze kellően pontosnak ahhoz, hogy ne sértse meg a terményeket.
A gyümölcsökkel már nem lenne gond
Pulkit Agrawal, az MIT professzora, a kutatásról szóló tanulmány egyik szerzője elmondta: "Kezdetben azt gondoltuk, hogy a vizuális érzékelési algoritmusok jelentik majd az elsődleges kihívást a tárgyak alakjának kikövetkeztetésére, miközben a robot megérinti és manipulálja őket. Ezzel szemben az eredményeink azt mutatják, hogy a vizuális észlelés sokkal kevésbé fontos a manipuláció szempontjából, mint ahogyan azt gondolni szoktuk, és egyszerűbb észlelésfeldolgozási stratégiák is elegendőek lehetnek."
"Sok kis, kör alakú tárggyal (alma, teniszlabda, golyó), közel száz százalékos sikerarányt értünk el, a legalacsonyabb sikerarányt pedig az összetettebb tárgyak kezelése eredményezte, például egy kanál, egy csavarhúzó vagy egy olló esetében olyan harminc százalék körül alakult".
"Kezdetben azt gondoltuk, hogy a vizuális érzékelési algoritmusok jelentik majd az elsődleges kihívást a tárgyak alakjának kikövetkeztetésére, miközben a robot megérinti és manipulálja őket." Fotó: Unspalsh
A betakarítási és szedőrobotok amúgy is egyre népszerűbbek a gazdálkodók körében, de a mezőgazdasági ipar több tucat más innovatív módszert is alkalmazhat, melyekkel megvalósítható a robotautomatizálás a termelési hozam javítása érdekében. Az élelmiszerek iránti kereslet már a mai demográfiai számok mellett is meghaladja a rendelkezésre álló termőföldek kapacitását, a gazdálkodók feladata így az lehet, hogy megoldják ezt a kihívást. A mezőgazdasági robotok ebben segíthetnek nekik.
|
(Forrás: Roboticsandautomationnews)

_fill_540x300_0.jpg)

_fill_540x300_0.jpg)



_fill_540x300_0.jpg)




_jpg_fill_540x300_0.webp "Fosszilis energiától független terményszárítás – Így spórolhat milliókat!")











_fill_360x200_0.jpg "Biomassza, takarmányfehérje és karbonsemlegesség – Merre tart a Hungrana?")






